
Un nuevo paso en la exploración de Marte están trabajando un grupo de investigadores de la Universidad de Aeronáutica y Astronáutica de Nanjing, que han desarrollado recientemente un nuevo robot de cuatro patas inspirado en lagartos que podría ayudar a la exploración de la superficie del planeta rojo.
Su robot, presentado en la revista Biomimetics de MDPI, tiene una estructura corporal flexible que puede replicar los movimientos y el estilo de locomoción de un lagarto del desierto.
«Para ayudar a las ambiciosas misiones no tripuladas a Marte, se han desarrollado tipos específicos de rovers planetarios para realizar tareas en la superficie de Marte», escribieron Guangming Chen, Long Qiao, Zhenwen Zhou, Lutz Richter y Aihong Ji en su artículo. «Debido al hecho de que la superficie está compuesta de suelos granulares y rocas de varios tamaños, los rovers contemporáneos pueden tener dificultades para moverse en suelos blandos y trepar sobre rocas. Para superar tales dificultades, esta investigación desarrolla un robot rastrero cuadrúpedo inspirado en las características de locomoción del lagarto del desierto.
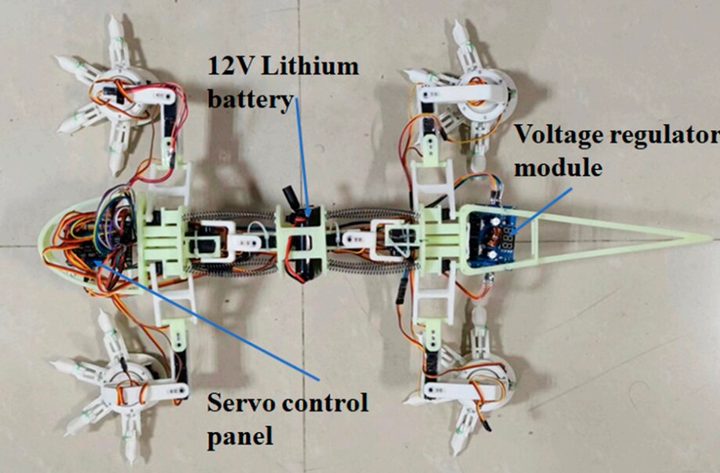
El robot biomimético creado por Chen y sus colegas se compone de una estructura flexible similar a una columna vertebral y cuatro patas. Para replicar el movimiento «rastrero» típico de los lagartos, cada pierna cuenta con dos bisagras y un engranaje que provoca un movimiento de balanceo.
Cada una de las articulaciones de la cadera que conecta la estructura de la columna vertebral con las piernas del robot está hecha de dos servos y un mecanismo de cuatro enlaces que permite al robot levantar sin perder el equilibrio. Los «pies» del robot tienen cuatro «dedos» flexibles, que consisten en dos bisagras y una garra.
Para replicar los movimientos de los lagartos, los investigadores crearon una serie de modelos cinemáticos para cada uno de los componentes de su robot. Luego utilizaron estos modelos y cálculos numéricos para planificar los movimientos del robot.
«Para determinar los movimientos del robot, se establecen modelos cinemáticos relacionados con el pie, la pierna y la columna vertebral», escribieron Chen y sus colegas en su artículo. «Además, los movimientos coordinados entre la columna vertebral del tronco y la pierna se verifican numéricamente».
Los investigadores evaluaron inicialmente su robot en una serie de simulaciones, para determinar si podía replicar eficazmente los movimientos de los lagartos. Sus resultados fueron muy prometedores, ya que descubrieron que su robot podía realizar los movimientos deseados y el estilo de caminar.
Descubrieron que el robot podía moverse eficazmente en entornos rocosos, destacando su potencial para futuras misiones en el planeta rojo. Sin embargo, antes de que pueda implementarse y probarse fuera del laboratorio, el equipo deberá desarrollarlo aún más, por ejemplo, agregando una estructura de sellado protector que lo proteja del suelo o el polvo en el aire y construyendo su cuerpo con materiales más resistentes.



